


科力達(dá)KTS-552R15智能安卓全站儀點(diǎn)測量、點(diǎn)放樣、后方交會(huì)介紹
科力達(dá)KTS-552R15智能安卓全站儀,輕點(diǎn)界面,一鍵進(jìn)入機(jī)載軟件測繪之星,圖形化界面,功能程序一目了然,看得懂,操作更快。

帶你全新體驗(yàn)科力達(dá)智能安卓全站儀點(diǎn)測量、點(diǎn)放樣、后方交會(huì)是如何“簡單”操作,我們一起來看看。
智能安卓全站儀開機(jī),進(jìn)入工作桌面,點(diǎn)擊測繪之星軟件。

測繪之星主菜單
1、坐標(biāo)測量
1、首先,新建工程,點(diǎn)擊工程進(jìn)入工程列表,工程列表中會(huì)顯示儀器里所有保存的工程,以及當(dāng)前使用的工程,若要新建工程(正常情況下,每換一個(gè)工程,都需要新建一個(gè)新的工程)點(diǎn)擊屏幕右下角的“+”圖標(biāo)即可。

輸入新的工程名稱,以及作業(yè)人員或備注信息,點(diǎn)擊完成。

2、之后退出到測繪之星主菜單,點(diǎn)擊建站,選擇已知點(diǎn)建站。

進(jìn)入已知點(diǎn)建站界面,點(diǎn)擊測站后面的“+”。

進(jìn)入選擇數(shù)據(jù)來源界面,選擇調(diào)用(提前把測站坐標(biāo)輸入到內(nèi)存里)或者新建(直接輸入測站坐標(biāo))。

這里選擇新建,進(jìn)入新建測站坐標(biāo)界面,輸入測站坐標(biāo),點(diǎn)擊確定。

3、返回已知點(diǎn)建站界面,選擇定向方式:坐標(biāo)后視或者方位角后視,如果是方位角后視則選擇方位角,并且輸入正確的方位角。如果是坐標(biāo)后視,則選擇后視點(diǎn),點(diǎn)擊后視點(diǎn)后面的“+”輸入后視點(diǎn)坐標(biāo)。接著,輸入全站儀儀器高(從地面點(diǎn)中心上量取到儀器側(cè)面的橫線),再輸入棱鏡高度(后視地面點(diǎn)到棱鏡中心的高度)。用全站儀精確照準(zhǔn)后視棱鏡中心,點(diǎn)擊“設(shè)置”。


4、接著,點(diǎn)擊后視檢查,點(diǎn)擊測量,查看輸入的后視坐標(biāo)與實(shí)測后視坐標(biāo)的差值:dN、dE、dZ、dSD,差值越小越好,說明精度越高。后視檢查沒有問題,返回。

點(diǎn)擊“測量”。


5、接著返回,點(diǎn)擊主菜單界面的“采集”菜單,選擇“點(diǎn)測量”。



6、接下來儀器瞄準(zhǔn)前視棱鏡,點(diǎn)擊“測量”采集被測點(diǎn)的坐標(biāo),測量完成后屏幕左側(cè)N:E: Z:出現(xiàn)數(shù)據(jù),接著輸入點(diǎn)名和前視棱鏡高,點(diǎn)擊“保存”,坐標(biāo)數(shù)據(jù)存入儀器內(nèi)存。快速測量可以直接點(diǎn)擊“測存”,相當(dāng)于“測量+保存”。

測完一個(gè)點(diǎn)后,不退出界面接著測量下一個(gè)點(diǎn),以此類推,直到測完本測站所有目標(biāo)點(diǎn)。
2、放樣測量
1、返回測繪之星主菜單,建站定向方式與坐標(biāo)測量一致。建站定向成功后,點(diǎn)擊“放樣”圖標(biāo),選擇“點(diǎn)放樣”。


2、進(jìn)入點(diǎn)放樣界面,點(diǎn)擊“+”,選擇“輸入”輸入放樣的坐標(biāo)。如果事先已經(jīng)把放樣坐標(biāo)導(dǎo)入儀器內(nèi)存中,在這里可以選擇“調(diào)取”,在點(diǎn)庫里直接選擇放樣的坐標(biāo)。


3、輸入完畢放樣坐標(biāo)后,點(diǎn)擊“確定”,輸入棱鏡高,根據(jù)dHA顯示角度,旋轉(zhuǎn)儀器,直至dHA角度歸零“00°00"00'”,之后照準(zhǔn)棱鏡點(diǎn)擊“測量”,得到棱鏡前后移動(dòng)的距離,通過不斷照準(zhǔn)棱鏡點(diǎn)擊“測量”,直至“dHA、前或后、填或挖”全部歸零,完成該點(diǎn)放樣。


3、后方交會(huì)
1、在測繪之星主菜單界面,點(diǎn)擊“建站”,選擇“后方交會(huì)”。

2、點(diǎn)擊“測量第1點(diǎn)”。

點(diǎn)擊“+”。

選擇“輸入”。

輸入第1已知點(diǎn)的坐標(biāo),點(diǎn)擊確定。

接著輸入棱鏡高,照準(zhǔn)架設(shè)在第1點(diǎn)的棱鏡,點(diǎn)擊“測角&測距”,測完后,點(diǎn)擊“完成”。

3、接著點(diǎn)擊“測量第2點(diǎn)”。


點(diǎn)擊“+”。

選擇“輸入”。

輸入第2已知點(diǎn)的坐標(biāo),點(diǎn)擊確定。

接著輸入棱鏡高,照準(zhǔn)架設(shè)在第1點(diǎn)的棱鏡,點(diǎn)擊“測角&測距”,測完后,點(diǎn)擊“完成”。

4、儀器進(jìn)入后方交會(huì)初始界面,屏幕出現(xiàn)測量完成的第1點(diǎn)和第2點(diǎn),如果還有第3點(diǎn),可以以此類推,接著測量第3點(diǎn)。

5、點(diǎn)擊“計(jì)算”,得出測站點(diǎn)的坐標(biāo)(殘差“dZ、 dHD越小越好”),后方交會(huì)完成。

更多相關(guān)

中海達(dá)TS5 PRO:高性價(jià)比RTK,助力精準(zhǔn)測量
中海達(dá)TS5PRORTK:高性價(jià)比之選,助力精準(zhǔn)測量 在工程測量領(lǐng)域,RTK設(shè)備的性能直接影響著測量效率和精度。中海達(dá)TS5PRORTK憑借出色的性能和...

中國牛 京臺(tái)高速 打造北斗定位的智慧高速
近日,由山東高速集團(tuán)投資建設(shè)的京臺(tái)高速泰安至棗莊段改擴(kuò)建工程舉行通車活動(dòng),該項(xiàng)目是全國首條全線開通的改擴(kuò)建智慧高速。 這條先行先試的智慧高速,融合了5G、大數(shù)據(jù)、物聯(lián)網(wǎng)、北斗定位等前沿技術(shù),它是目前...
坐標(biāo)轉(zhuǎn)換中的七參數(shù)詳談,測量員值得收藏
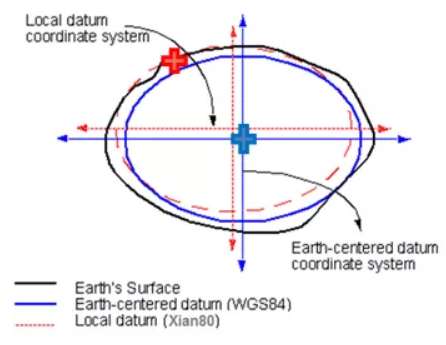
坐標(biāo)轉(zhuǎn)換永遠(yuǎn)是測繪工作離不開的一個(gè)話題。坐標(biāo)轉(zhuǎn)換的方法很多,有的方法可以用相應(yīng)的參數(shù)來描述,其中使用較廣的一個(gè)是七參數(shù)。七參數(shù)大多用于不同坐標(biāo)系統(tǒng)間的基準(zhǔn)變換。 七參數(shù)的由來 對(duì)于非測繪的專業(yè)...

中海達(dá)iBoat BSA無人船在水下測量中的應(yīng)用
中海達(dá)iBoatBSA無人船是一款安卓無人智能測量船。船體僅重6KG,輕巧便攜,單人輕松作業(yè)。采用M型船底,流體仿真設(shè)計(jì),阻力小,航行更平穩(wěn)。船體加固防護(hù),毫米波避障設(shè)計(jì),安全可靠。采用測深、船控二...
盤點(diǎn)2018:十大關(guān)鍵詞回顧測繪地理信息行業(yè)
站在測繪地理信息行業(yè)的整個(gè)發(fā)展歷史角度來看,2018,這是一個(gè)值得整個(gè)行業(yè)銘記的時(shí)間節(jié)點(diǎn)。 下面我們通過十個(gè)關(guān)鍵詞來重新梳理下2018年勘測行業(yè)的發(fā)展脈絡(luò),同時(shí)也回顧下整個(gè)2018各自的工作足跡...

UFO-U3互聯(lián)網(wǎng)RTK_安卓系統(tǒng)主機(jī)RTK
RTK也可以很互聯(lián)網(wǎng)從用戶的角度思考測繪旗艦配置丨功能多種丨質(zhì)量穩(wěn)定丨作業(yè)高效丨設(shè)計(jì)精致安卓系統(tǒng)主機(jī),全智能系統(tǒng)平臺(tái)表現(xiàn),始于平臺(tái) RTK主機(jī)系統(tǒng)經(jīng)歷了從單片機(jī)到ARM、Linux的進(jìn)化,UFO將基...
山西省第五屆測繪地理信息職業(yè)技能競賽閉幕
6月28日至29日,由山西省測繪地理信息局舉辦的第五屆全國測繪地理信息行業(yè)職業(yè)技能競賽山西選拔賽在太原舉行。山西省測繪地理信息局黨組成員、副局長孔令禮出席開、閉幕式。 本屆競賽分工程測量和地...

其域靈光Lixel L2 Pro三維激光掃描儀
其域靈光LixelL2Pro三維激光掃描儀是其域創(chuàng)新研發(fā)的一款手持三維實(shí)時(shí)重建設(shè)備,以下是對(duì)該產(chǎn)品的詳細(xì)介紹:一、產(chǎn)品概述其域靈光L2Pro三維激光掃描儀集成了激光雷達(dá)、三彩色相機(jī)、高精度慣導(dǎo)及...
 環(huán)球測繪微信
環(huán)球測繪微信